きらめく若い想像力で、廃炉ロボットの未来を切り拓こう! The 5th Creative Robot Contest for Decommissioning
課題概要
(1)競技課題
・競技フィールド
福島第一原子力発電所のペデスタル下部に存在する燃料デブリ取出しを想定し、ペデスタルモックアップを競技フィールドとする。
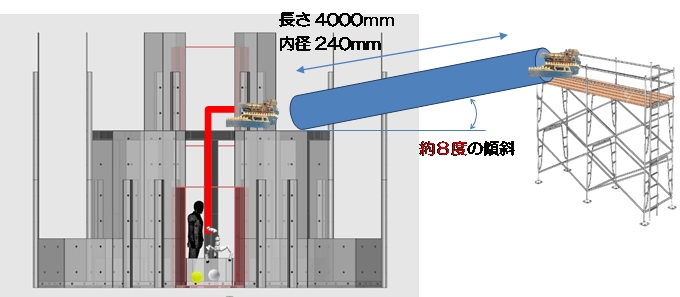
外部からペデスタル内部へのアクセスは呼び外径250、長さ4000mmの塩ビパイプ(VP250 外径>267mm×内径240mm)を使う。
ペデスタルモックアップの詳細については下記画像を参照のこと。
プラットフォーム上のグレーチングの形状と寸法については別途公表するが、障害物や欠損箇所が存在する。
・フィールド環境
①ロボットを遠隔で操作するため、本体を直視することができない。
②オペレーションエリアとペデスタルモックアップの間は無線通信できない。
・ロボットが遂行する課題
プラットフォームから3.2m下の床の上に複数個置かれているデブリ模擬体を回収し、ペデスタルの外に
移動させる。デブリ模擬体は以下の通りとする。
①重量及び形状不明のデブリ模擬体
②円錐状のデブリ模擬体
③柔らかく壊れやすい模擬体
なお、いくつかのデブリ模擬体は底面に固着している状態とする。
※②、③の詳細及び固着状態については別途公表する。
・ロボットの大きさ,重量
①大きさ
・スタート時のロボット全長は1000mm以下とする。
②重量
・本体の重量は15kgまでとする。なお、遠隔操作に必要なケーブル類は重量に加えない。
・遠隔操作に必要なケーブルは、送り出し前およびロボット回収後の状態が、ハンドリングが容易なよう
にコンパクトに整っていること。
(2)競技形式
※ 参考資料

競技フィールドの外観
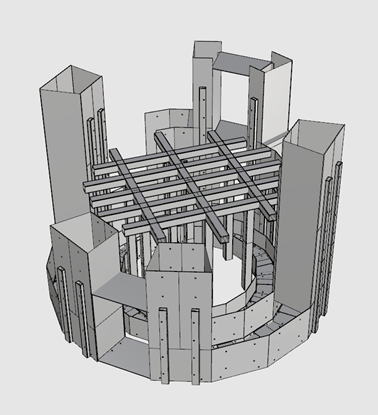
ペデスタルモックアップのパース図(中央部:プラットフォーム)
※デブリ模擬体は、開口部を床に投影した範囲でランダムに置く
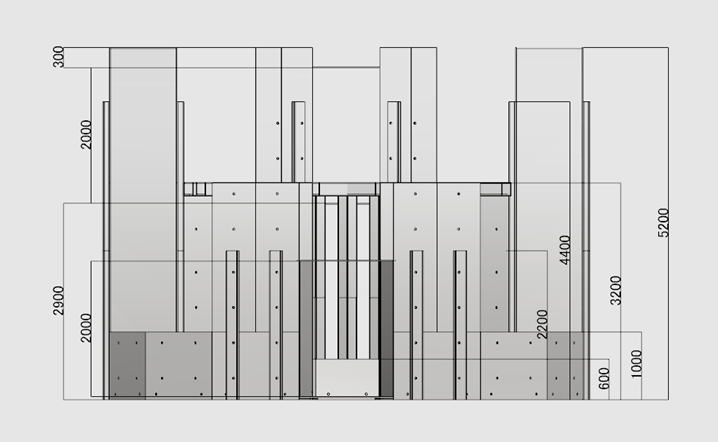
ペデスタルモックアップ各所寸法
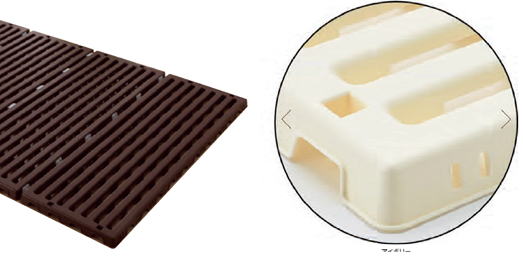
グレーチングの形状
第5回 廃炉創造ロボコン
福島工業高等専門学校 総務課 地域連携係
〒970-8034
福島県いわき市平上荒川字長尾30
TEL:0246-46-0719 FAX:0246-46-0713
MAIL:liaison_office【at】fukushima-nct.ac.jp
迷惑メール対策のため【at】を@に修正してください
copyright©2020 The 5th Creative Robot Contest for Decommissioning all rights reserved.